| 产品特性:机器人焊接 | 是否进口:否 | 产地:中国 |
| 品牌:OTC | 型号:FD-B6L | 控制方式:自动 |
| 焊接原理:弧焊 | 可用焊丝直径:1.0mm | 3C证书编号:468903 |
| 订货号:zzkh20200315 | 货号:20200315 | 焊接材质:低碳钢 |
| 保护气体类型:二氧化碳 | 输入电压:220V | 频率:80 |
| 额定输入电源容量:3KVA | 空载输出电压:20V | 输出电流调节范围:320A |
| 引弧方式:自动 | 额定负载持续率:80% | 功率:3W |
| 效率:高 | 功率因素:自动 | 绝缘等级:1 |
| 外壳防护等级:1 | 外形尺寸:120 | 用途:焊接 |
| 频段:3 | 焊咀对地电压:23mV | 工具净重:125Kg |
| 套装:1 |
产品简介:
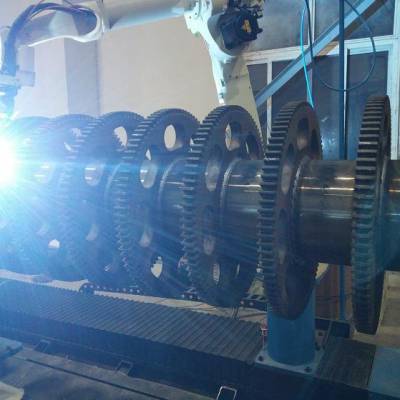
纺织压辊机器人自动化焊接工作站具有较强的针对性,主要适用于纺织机械行业,是智能焊接装备专门化的体现。除了对通用焊接机器人可靠、准确、高效要求之外,在工作站的整体框架、设备的机械传动、整体控制精度、焊接质量在线控制、与周边设备、环境的协调等方面做出了全面的智能化调整。同时由于所焊结构类型差异较大,纺织压辊机器人自动化焊接工作站还具有与之配套的工装卡具,***拓展了其较强的柔性加工特性。
产品参数:
机器人臂展:1402mm
机器人自由度:6轴
有效负载量:6kg
驱动功率:4650w
重复定位精度:±0.08mm
应用领域:
本产品具有较强的针对性,主要适用于纺织机械行业。根据不同工件的特性,同类型工作站可应用于焊接、铸造、机械加工、智能仓储、汽车、航天、压力容器、钣金加工、机箱机柜、钢结构等行业领域。
产品亮点:
1、本产品采用了***的视觉传感技术、电弧传感技术、坐标转换技术和动态补偿技术,提高了产品的焊接精度和质量,具有高度的加工智能化。
2、采用更***的伺服控制系统,动作更快,反应更敏捷,使机器人在加速方式下运行,节省工作时间,功能更强大,能很好地满足客户需求。
3、操作简单,具有有好的人机界面,中文显示,工人技术培训简单。采用体积小、轻巧,使用方便,且是完全独立的多关节机器人,较为广泛的拓展了机器人的运动范围。
4、良好的售后服务,产品部件尽可能标准化和模块化,同时随时进行网络技术指导和现场技术服务。
产品构成:
纺织压辊机器人自动焊接工作站包含机器人本体,焊接软件,电弧跟踪系统,接触寻位系统,清枪剪丝系统、伺服变位机,地轨行走轴。
关键技术及优势:
1、多种传感信息融合的自主编程技术
本项目采用力控制器、位移传感器等构成一个高精度自动路径生成系统。该系统中机器人能够根据记号笔所绘制的线自动生成机器人路径,位移控制器用来保持机器人焊枪点的位姿,力传感器用来保持焊枪与工件表面距离恒定。
2、柔性自动化焊接系统
柔性自动化焊接系统采用双机器人,实现焊接过程全自动化。全封闭式焊房,确保焊接烟尘不往外扩散,同时阻挡焊接弧光对人眼睛的伤害。每个工位夹具可实现快速切换,同时整线的总控制触摸屏上可实现焊接程序的快速切换,从而实现不同产品工件生产的快速切换。
3、基于双视觉的自主编程技术
本项目通过视觉系统采集并识别焊缝图像,计算空间轨迹和方位(即位姿),并按优化焊接要求自动生成机器人焊枪的位姿参数。采用联机测量模式,图像可实时传输,故测量速度快,可实现实时或准实时测量,实现精密定位。
4、焊缝跟踪技术
本产品的焊缝跟踪技术根据焊接条件的变化要求焊接机器人能够实时检测出焊缝的偏差,并调整焊接路径和焊接参数,***焊接质量的可靠性。实时性好,焊枪运动灵活,符合焊接过程低成本自动化的要求,适用于熔化极焊接场合。
5、设计坐标系与焊机坐标系的转换技术
本项目通过换算CAD图形某特征点的坐标与焊机坐标,获得***的焊枪坐标,***在焊接过程中,焊枪处于***地位置和正确的姿态。
6、动态动作轨迹补偿算法
本项目通过采用自有的动态动作轨迹补偿算法,可以对由于电机、减速机的运动产生的误差予以补偿和调整,通过控制软件调整补偿硬件的精度,降低了对硬件(国外高精度电机、减速机)的设计要求和依赖性,大大降低了成本。
技术参数:
编号 | 项目 | 参数 |
1 | 工件尺寸 | 可按用户的工件大小设计 |
2 | 工件重量 | 可按用户要求设计 |
3 | 焊接速度 | 一般取5~50mm/s,根据焊缝大小来选定 |
4 | 机器人重复定位精度 | ±0.08mm |
5 | 移动机构重复定位精度 | ±0.15mm |
6 | 变位机重复定位精度 | ±0.3 |
7 | 机器人臂展 | 1402mm |
8 | 驱动功率 | 4650w |